

据外媒报道,加州车管局发布了《2017自动驾驶“脱离报告”(California Autonomous Vehicle “Disengagement Reports”)》,其中谈及了“脱离”的具体原因。
以百度为例,在2016年8月31日至2017年11月30日期间,其总测试里程数为1,971.74英里(约合3,173公里),“脱离”48次,这意味着每隔41英里(66公里)发生一次“脱离”。
相较于路况条件或事故,“脱离”类故障的起因是软件与感知传感设备,其竭力识别停靠车辆。
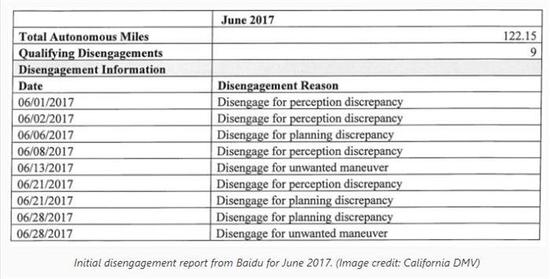
百度最初的报告列举了“多余操作脱离(Disengage for unwanted maneuver)”的示例,但该公司在事后递交的报告中证实该故障属于“对穿马路行人的感知延迟(Delayed perception for pedestrian running into the street)”。
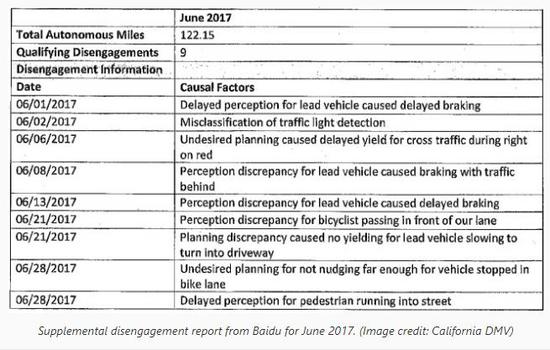
而“规划差异脱离(Disengage for planning discrepancy)”在新报告中变为了“因右侧存在大型灌木致使路线规划不尽人意,导致后方车辆采取制动操作规避(Undesired planning near large bush on right caused braking with traffic behind)”。
行人与骑行者也是造成系统出问题的原因。在所有用“脱离”例中,均由驾驶员接管车辆的操控,实际上并未发生碰撞事故。



 4月30日24时:92号汽油下调0.06元/升
4月30日24时:92号汽油下调0.06元/升
 深扒广告震天响的二手车网站:互联网下的可耻内
深扒广告震天响的二手车网站:互联网下的可耻内
 摩拜、美团、滴滴等企业加入 共享汽车何时破局
摩拜、美团、滴滴等企业加入 共享汽车何时破局